目录
强化学习是机器学习的一个重要分支,它研究如何通过与环境的交互来学习最优决策策略。与监督学习和无监督学习不同,强化学习的特点在于它强调学习过程中的序列决策和长期回报。
在这一章中,我们将从最基本的概念开始,逐步构建强化学习的理论框架。我们将介绍状态、动作、策略、奖励等核心概念,并最终引入马尔可夫决策过程(MDPs)这一描述强化学习问题的数学工具。为了使这些抽象的概念更加直观,我们将使用一个简单的网格世界例子来阐述这些概念。这个例子虽然简单,但它包含了强化学习中的许多关键元素,可以帮助我们理解更复杂的问题。
1. 网格世界示例
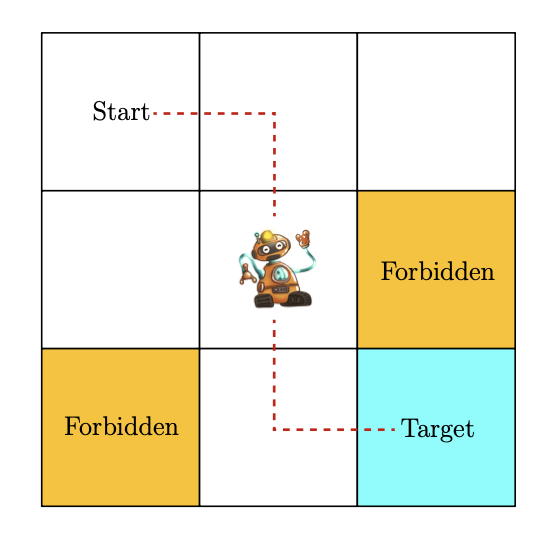
为了更直观地理解强化学习的基本概念,我们先来看一个简单的网格世界示例。想象一个机器人(智能体)在一个3x3的网格世界中移动,其中有些格子是禁止进入的,还有一个目标格子。机器人的任务是从任意起始位置出发,找到一条到达目标格子的最优路径,同时避开禁止区域和不必要的绕路。
2. 状态(State)和动作(Action)
状态是描述智能体在环境中所处位置或状况的概念。在网格世界中,状态就对应着机器人所在的格子位置。我们可以用来表示这9个状态。所有可能的状态构成了状态空间。
动作则是智能体可以采取的行为。在这个例子中,机器人在每个状态下都有5种可能的动作:向上移动、向右移动、向下移动、向左移动以及保持不动。我们用来表示这5个动作。所有可能的动作构成了动作空间。
需要注意的是,不同的状态可能有不同的动作空间。比如在边界格子,向上()或向左()移动会导致碰壁,因此的动作空间可能只包含。但为了简化问题,我们通常假设所有状态的动作空间都是相同的。
3. 状态转移(State Transition)
当智能体在某个状态下执行一个动作后,它会从当前状态转移到下一个状态,这个过程称为状态转移。例如,如果机器人在状态下执行向右移动()的动作,它就会转移到状态,我们可以表示为:。
状态转移可以用条件概率来描述。例如,表示在状态下执行动作后,转移到状态的概率为1。在确定性环境中,状态转移是确定的,但在随机环境中,状态转移可能是概率性的。
4. 策略(Policy)
策略是智能体在每个状态下选择动作的方法。直观上,我们可以把策略想象成一系列箭头,指示智能体在每个状态下应该采取什么动作。
数学上,策略可以用条件概率来表示,它表示在状态下选择动作的概率。例如,表示在状态下一定会选择动作。
策略可以是确定性的,即在每个状态下只选择一个特定的动作;也可以是随机性的,即在一个状态下可能以不同的概率选择不同的动作。
5. 奖励(Reward)
奖励是强化学习中最独特的概念之一。智能体在执行动作后,会从环境中获得一个奖励信号,这个奖励是状态和动作的函数,记作。奖励可以是正数、负数或零。
在网格世界例子中,我们可以这样设计奖励:
- 如果智能体试图越界,奖励为-1 ()
- 如果智能体试图进入禁止区域,奖励为-1 ()
- 如果智能体到达目标状态,奖励为+1 ()
- 其他情况下,奖励为0 ()
奖励机制可以看作是人机交互的接口,通过它我们可以引导智能体按照我们期望的方式行动。设计合适的奖励函数是强化学习中的一个关键步骤,虽然有时候并不容易,但通常比直接解决问题要简单得多。
6. 轨迹(Trajectory)、回报(Return)和回合(Episode)
轨迹是智能体与环境交互过程中形成的状态-动作-奖励链。例如,按照某个策略,智能体可能会形成这样一条轨迹:
回报是沿着轨迹收集到的所有奖励之和。对于上面的轨迹,回报就是。回报也被称为总奖励或累积奖励。
我们可以用回报来评估策略的好坏。回报越高,说明策略越好。但需要注意的是,回报包括即时奖励和未来奖励,因此在做决策时不能只看即时奖励,而应该考虑长期的累积回报。
对于无限长的轨迹,我们引入折扣回报的概念:
其中是折扣率。折扣率的引入有两个好处:一是避免了无限长轨迹的回报发散,二是可以通过调整来控制智能体对近期和远期奖励的重视程度。
回合(Episode)是指从初始状态开始,到达某个终止状态的完整轨迹。有终止状态的任务称为回合式任务(Episodic tasks),没有终止状态的任务称为持续式任务(Continuing tasks)。
7. 马尔可夫决策过程(Markov Decision Processes, MDPs)
马尔可夫决策过程是描述强化学习问题的一般框架。一个MDP包含以下几个关键要素:
- 状态空间
- 动作空间,对每个状态都有一个对应的动作集
- 奖励集,对每个状态-动作对都有一个对应的奖励集
- 状态转移概率,表示在状态下执行动作后转移到状态的概率
- 奖励概率,表示在状态下执行动作后获得奖励的概率
- 策略,表示在状态下选择动作的概率
MDP的一个重要特性是马尔可夫性(Markov property), 即下一个状态和奖励只依赖于当前的状态和动作,与之前的历史无关:
这个性质对于推导强化学习的基本方程(如Bellman方程)非常重要。
8. 补充说明
-
奖励的设计:奖励的设计可以是相对的。例如,我们可以给所有奖励值加上一个常数,不会改变最优策略。
-
奖励与下一个状态的关系:虽然我们通常将奖励表示为,但实际上奖励也可能依赖于下一个状态。我们可以通过来将其转换为只依赖于和的形式。
本文作者:YI HE
本文链接:
版权声明:该笔记内容来源于西湖大学智能无人系统实验室[Shiyu Zhao](https://www.shiyuzhao.net/)老师的强化学习课程:[Mathematical Foundations of Reinforcement Learning](https://www.shiyuzhao.net/opencourse) 。有兴趣的同学可以自行查看老师的课程。